
阿米嘎嘎
我们只创造能为大家带来价值的科技型产品
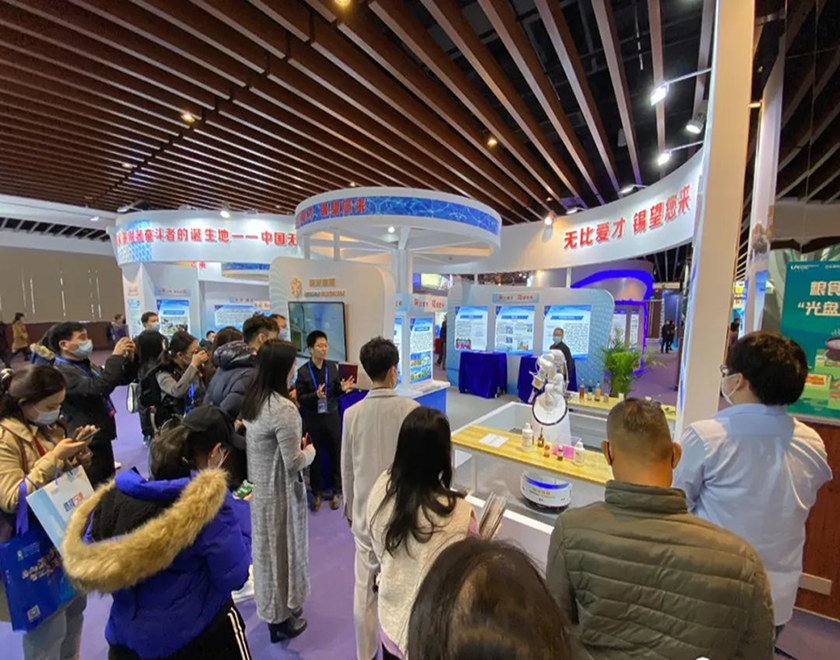
深圳阿米嘎嘎科技有限公司创立于2020年,公司总部位于深圳,是一个拥有前沿技术与远大理想的机器人公司。
我们创始人创办公司的初衷是为了帮助全国高校与中小学人工智能实验室建设,中小型企业及独立开发者机器人服务的开发,赋能教育等各个行业。
博士比例
知识产权
开发经验
顶尖国际合作项目

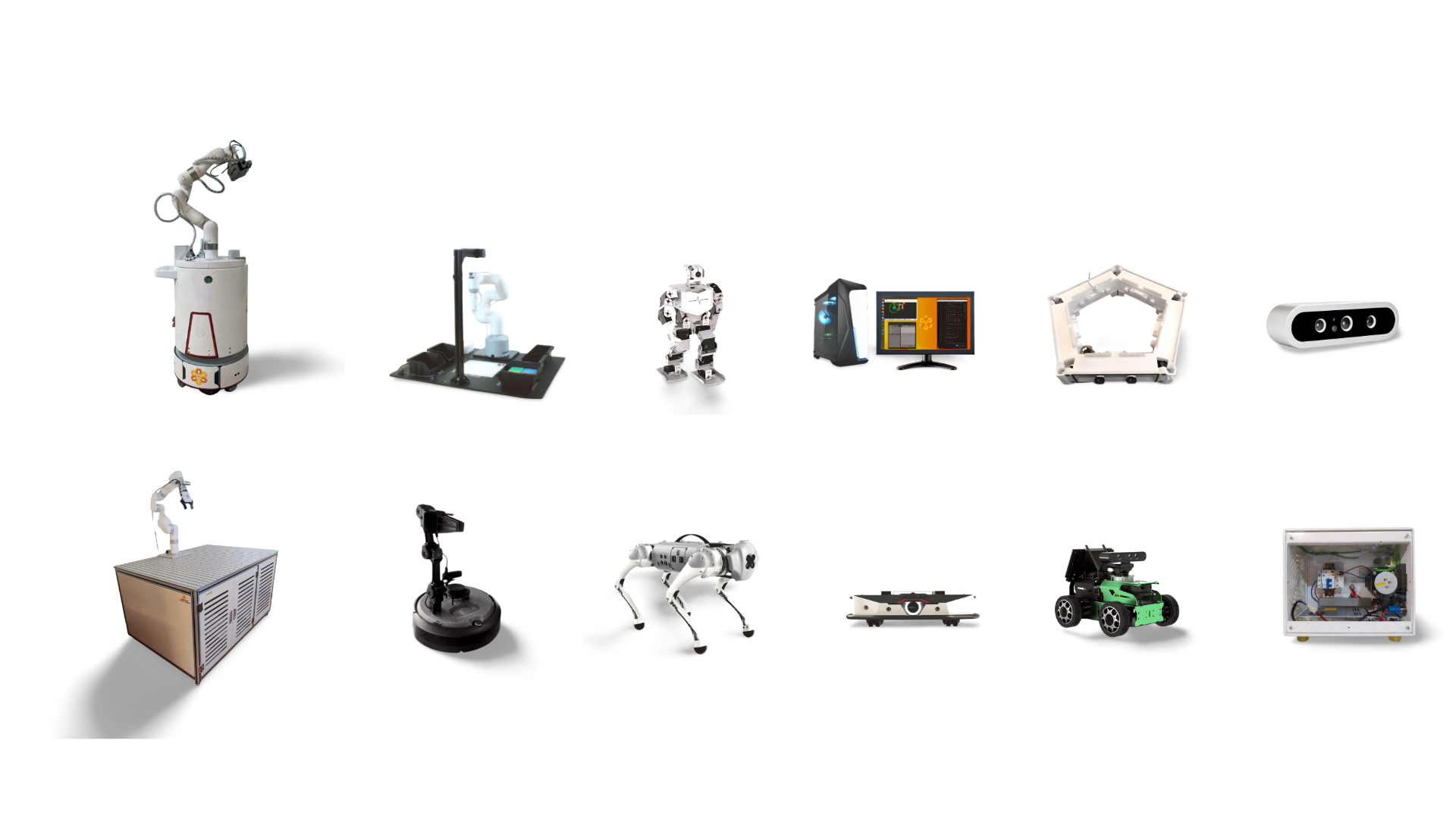
PRODUCTS
核心组件
视觉传感器
移动底盘
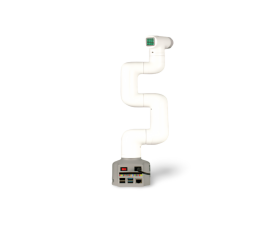
机械臂系列
足式机器人
复合机器人
EXPERIMENTS

实验流程:(1)了解机器人以及任务环境的参数以及输入输出变量,定义任务奖励。(2)针对四足机器人摔倒后恢复站立姿态的任务,设计神经网络与奖励函数。(3)在仿真环境中对神经网络进行测试迭代,优化性能。(4)在仿真环...
查看更多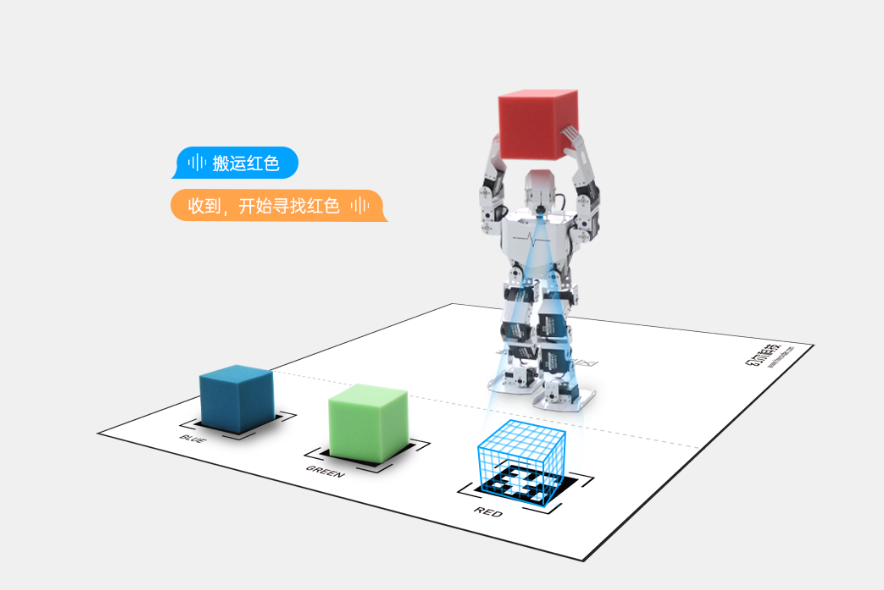
实验流程:(1)自动踢球实验(2)智能巡线实验。(3)人脸识别实验。(4)颜色识别实验。(5)颜色追踪实验。(6)标签识别实验。(7)学生结合以上所学知识,自主选题,设计控制任务与机器人功能。设备需求:双足机器人平...
查看更多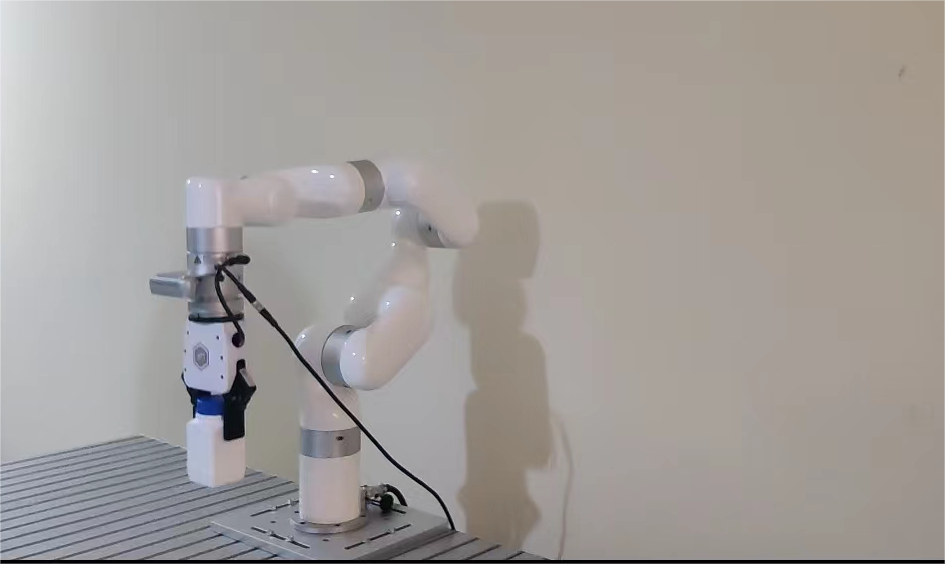
实验流程:(1)使用计算机视觉的方法识别瓶子、杯子及定位它们的目标位置。(2)使用MoveIT!规划机械臂路径,将杯子放置到固定的位置。(3)使用MoveIT!规划机械臂路径,将瓶子放置到指定的位置。(4)将瓶内颗...
查看更多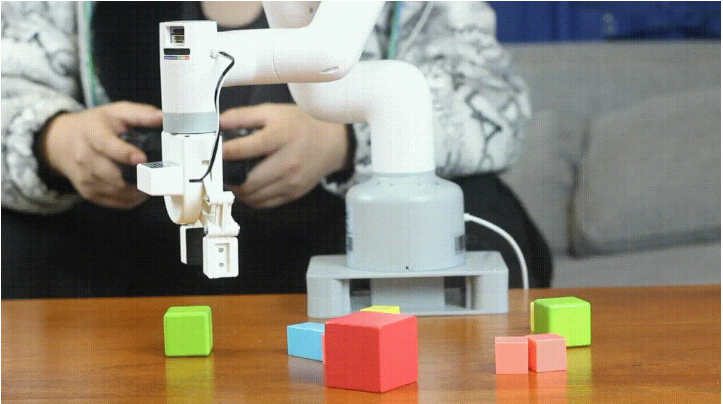
实验流程:(1)摆放桌面微缩实验环境。;(2)矫正摄像头畸变。(3)标定摄像头与机械臂坐标系。(4)根据物品特征及摄像头采集的数据,设计物品识别与定位程序。(5)人为观察物品识别与定位程序的准确性。...
查看更多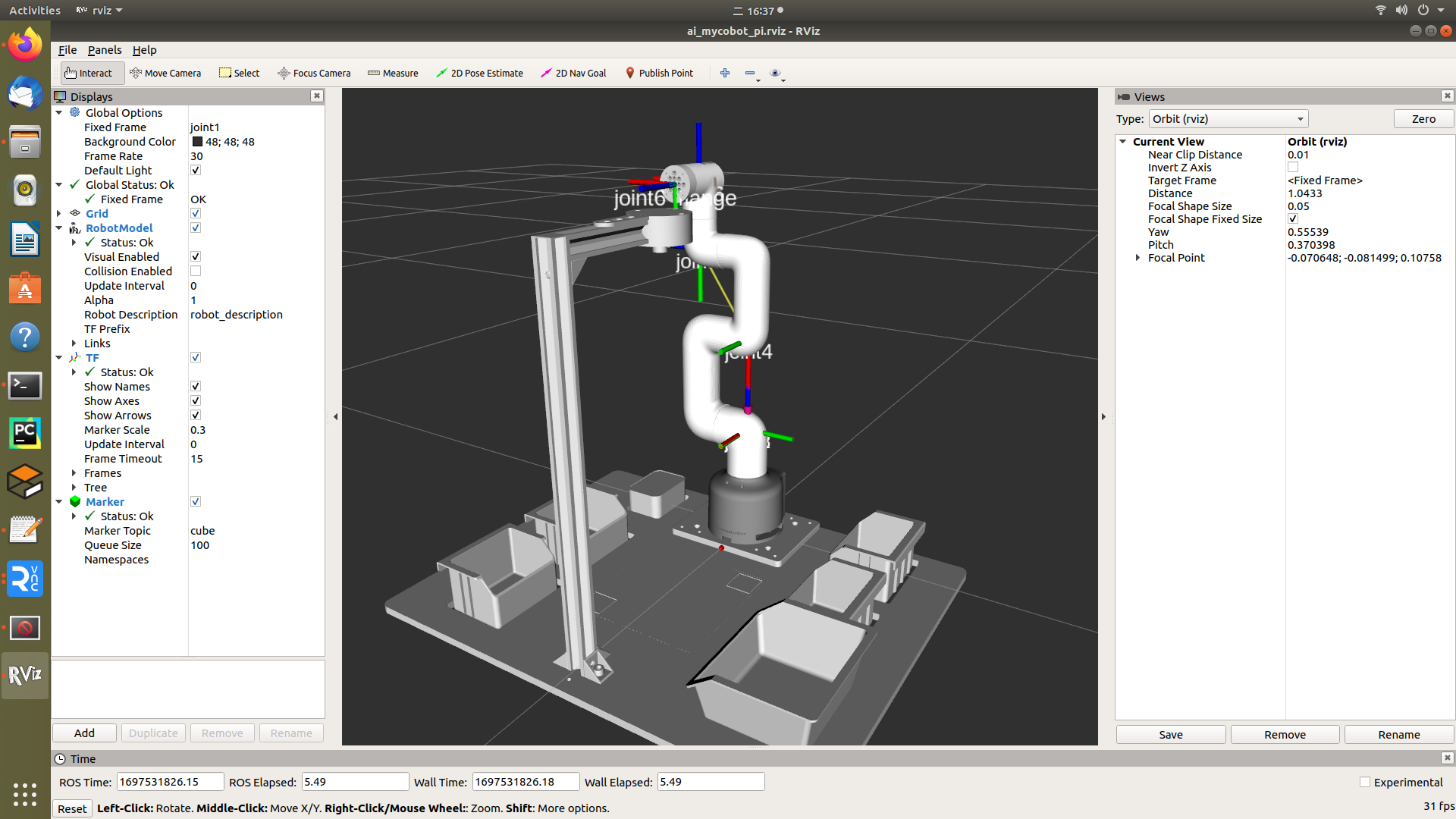
实验流程:(1)导入物品模型与机器人URDF模型。(2)确认仿真中产生的各种信息状态正常与否。(3)使用RViv设置机器人目标位置,并用MoveIT!生成运动轨迹。(4)执行并观察仿真中机器人的变化。(5)使用MoveIT!中的Py...
查看更多
实验流程:(1)使用上位机对伺服电机进行底层控制。(2)调整比例项、积分项或微分项,进行实验,记录关节的位置、速度变化,分析不同项对控制精度的影响(3)切换不同控制模式,位置模式、速度模式、力矩模式,进行试验...
查看更多CONTACT US
 提交成功!
提交成功! 5s内不可重复提交!
5s内不可重复提交!

微信公众号

微信视频号
18680748866
marketing@amigaga.com
3040594859
 扫码添加微信
扫码添加微信